Theoretische Grundlagen des Gleichstrom-Elektromotors
|
Einleitung
1. Grundlagen zu Magnetismus & Elektrizität
Fliesst Strom durch einen Leiter, so bewegen sich dessen Ladungsträger. Befindet sich dieser Leiter in einem (möglichst homogenen) Magnetfeld, so wirkt die sogenannte Lorenzkraft auf jeden der einzelnen Ladungsträger. Stellen wir uns die Ladungsträger als kleine Kugeln vor, die sich, aufgereiht wie auf einer Perlenkette, innerhalb des Leiters bewegen und auf jede Kugel besagte (Lorenz-)Kraft wirkt, addieren sich diese "Einzelkräfte" zu einer "Gesamtkraft", welche auf diesen Leiterabschnitt wirkt. Umgekehrt erzeugt ein stromdurchflossener Leiter (also die Bewegung der Ladungstraeger), das sich um diesen Leiter ein kreisförmiges Magnetfeld aufbaut. (Wir merken uns diese Aussage fuer spaeter!)
Die Lorenzkraft wirkt orthogonal zur (sog. technischen) Stromrichtung und der Richtung des Magnetfeldes (sog. Wirkrichtung der Feldstärke). Eine einfache Methode zur Bestimmung der Richtung der Lorenzkraft ist die sogenannte "Rechte-Hand-Regel" wie in der folgenden Grafik dargestellt.
|
|
||||||
|
|||
|
|
||||||
Wir stellen fest, dass diese Ablenkungskraft - die Lorenzkraft - verantwortlich dafür ist, dass sich ein stromdurchflossener
Leiter in einem Magnetfeld bewegt und Grundlage für die Funktion eines Gleichstrommotores ist. (Gilt im übrigen auch
für Wechselstrommotoren.)
Der nachfolgende Abschnitt behandelt den Aufbau von Gleichstrommotoren.
2. Aufbau eines Gleichstrommotors
Der Gleichstrommotor der untenstehenden Animation ist ein sogenannter zweipoliger Gleichstrommotor mit der Polpaarzahl p = 1.
(Nord- und Südpol sind die sog. 'Feldkomponenten' eines Magneten = 1 Pol-Paar).
Der abgebildete Anker ist ein sogenannter Doppel-T-Anker. Dies ist die einfachste
Bauform, welche für einen Anker einer Gleichstrommaschine möglich ist. Den Namen hat
er von seiner Form erhalten, die an zwei zusammengesetzte "T`s " erinnert.
Kommutator und Bürsten kann man auch als einen mechanischen (Um-)Schalter verstehen, der beim Durchgang des Kollektors durch den Totpunkt (sog. 'Nulldurchgang') die Stromrichtung umkehrt.
Der Ständer (in der Animation nicht gezeigt!) stellt den gesamten äusseren Teil des Motors dar. Der Ständer ist gleichzeitig auch der sogenannte 'Jochring', der den magnetischen Rückschluss der Hauptpole garantiert. Die "austretenden" magnetischen Feldlinien "treten" dort wieder "ein" - Magnetische Feldlinien bilden immer einen geschlossenen Kreislauf. Die Feldlinien, welche in typischen Darstellungen stets vom Nordpol zum Südpol zeigen, haben in Wirklichkeit keinen Anfang und kein Ende, man kann sich vielmehr vorstellen, dass sie nach Erreichen des Nordpols wieder zum Südpol zurückkehren; allerdings beschreiben sie dabei nicht denselben Weg. Den "Rückweg" nehmen sie nämlich über den Ständer des Motors, um zum "Ausgangspunkt" (= Nordpol) zu gelangen.
|
|
|||||
3. Funktionsweise eines Gleichstrommotors
Zur Wiederholung: Ein Gleichstrommotor setzt sich im Prinzip aus einem feststehenden Stator, an dem die
Permanentmagnete angebracht sind und einem rotierenden Anker,
zusammen. In der untenstehenden Grafik sind die Pole des Feldmagneten durch N =
Nordpol und S = Südpol gekennzeichnet. Der Anker, der sich im Luftspalt des
Feldmagneten dreht, wird in der Abbildung mittels eines Balkens und zweier
Kreise dargestellt, die in a) die beiden Spulenhälften der
Ankerwicklung und in b), c) und d) die jeweilige Stromrichtung
symbolisieren sollen.
Das bereits in Abschnitt 1) erwähnte, 'elektrodynamische Gesetz'
besagt, dass auf eine stromdurchflossene Leiterschleife im
Magnetfeld die sich Kraft [F] abhängig vom Strom [I] und der magnetischen Feldstärke [B] ist. Ausserdem konnten wir in Bild 2 erkennen,
dass ein stromdurchflossener Leiter von einem kreisförmigen Magnetfeld umgeben
ist. Kombinieren wir nun das Magnetfeld des Feldmagneten mit dem Magnetfeld der
Leiterschleife, so können wir eine Überlagerung der beiden Felder sowie eine
daraus resultierende Kraftwirkung feststellen.
| a) | b) | c) | d) | e) |
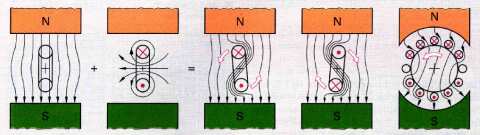
Wir erinnern uns daran, dass jede stromdurchflossene Spule ein eigenes Magnetfeld entwickelt und es dabei zu einer Überlagerung des Magnetfeldes des Permanatmagneten (sog. 'Erregerfeld') mit dem Magnetfeld der unteren Spulenhälfte und dem Feld der oberen Spulenhälfte kommt. Die Feldlinien des Permanentmagnetfeldes sind immer gleich gerichtet, sie zeigen stets vom Nord- zum Südpol. Die Felder der beiden Spulenhälften hingegen, in Bild 5b) durch Kreise mit je einem Pfeil dargestellt, haben entgegengesetzte Richtungen. Betrachten wir in Bild 5c) die untere Spulenhälfte, so sehen wir, dass auf der linken Seite des Feldes der Spulenhälfte die Feldlinien von Erregerfeld und Spulenfeld die gleiche Richtung aufweisen. Es ist dargestellt, wie es auf dieser Seite zu einer Verdichtung (=Überlagerung) der Feldlinien kommt (Wir erinnern uns an Abschnitt 1), sodass es zu einer Kraftwirkung in Richtung des verminderten Feldbereichs (in Bild 5c), d), e) durch weisse Pfeile dargestellt)kommt. Bild 5d) zeigt denselben Effekt bei umgekehrter Stromrichtung (= Umkehrung der Drehrichtung)
Aufgrund dieser Kraftwirkung in die jeweils entgegengesetzte Richtung am unteren und am oberen Ende des Ankers entsteht ein Drehmoment, welches wiederum eine Rotationsbewegung des Ankers verursacht.
Bild 5e) stellt die Kraftwirkung auf einen sog. Trommelanker dar. (Trommelanker werden oft bei handelsüblichen Gleichstrommotoren eingesetzt.) Wir erkennen, dass dieser Anker nicht nur eine Leiterschleife bzw. Ankerwicklung aufweist, sondern gleich mehrere. Demzufolge vergrössert sich auch die Kraftwirkung auf den Anker sowie das von ihm abgegebene Drehmoment.
Zusammenfassend stellt man fest:
|
|||
4. Ankerkonstruktionen
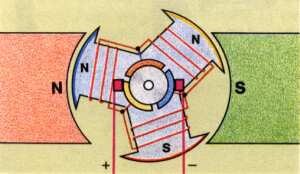
Bild 6: (Quelle: Gymnasium Donauwörth)
5. Bürstenfeuer und deren Ursache
Die Stromwendespannung verzögert den Stromwendevorgang, welcher jedoch nicht verzögert werden darf, solange die kommutierende Spule über die Bürste kurzgeschlossen ist. Ist dies der Fall, so kann zwischen der Bürste und dem ablaufenden Kommutatorsegment ein sogenannter Lichtbogen entstehen (also z.B. wie beim Elektro-Schweissen). Dieser Lichtbogen wird als Bürstenfeuer bezeichnet. Er beschädigt auf Dauer die Bürsten und die Kollektoroberflächen und führt auch zu Funkstörungen in unserem Empfänger (und anderen Elektrogeräten).
Um diese schädigende Wirkung der Stromwendespannung zu unterbinden, werden, üblicherweise bei Industriemotoren höherer Leistung, auf der Höhe des Nulldurchgangs sogenannten Wendepole (kleine Wicklungen, am Stator fixiert) angebracht. Derartige Elektromotoren sind praktisch immer mit Erregerwicklungen ausgestattet (also ohne Dauermagnete). Besagte Wicklungen der Wendepole werden vom Ankerstrom (sprich: "Motorstrom") durchflossen und erzeugen dadurch ein sog. Wendefeld, welches das Ankerfeld in der Wendezone aufhebt und in den kommutierenden Leitern (also in die Wicklungen, welche für einen sehr kurzen Moment ohne Stromfluss sind) eine Gegenspannung induziert. Diese Spannung ist etwa gleich gross wie die Reaktanzspannung, dieser aber entgegengesetzt, so dass es zu einer Art "Auslöschung" der beiden entgegengerichteten Spannungen kommt.
6. Statische und dynamische Grössen
P_Verlust_tot = P_Wärme+ P_Reibung + P_Antrieb
Bei Industriemotoren höherer Leistung ist die Arbeitsleistung typischerweise
viel grösser als die Leistung, die durch Reibung und Wärme verlorengeht,
bei manchen Modellmotoren jedoch nicht, da diese eine sehr hohe Leistung
innerhalb einer kurzen Zeitspanne abgeben müssen (Bsp. Flachbahnrenner)
und über die Hälfte der zugeführten elektrischen Energie in Form von Wärme
umgesetzt ("verheizt") werden kann. Bei solchen Modellen ist das Motorgewicht
ebenfalls mitentscheidend, da die zu beschleunigende Masse (Totalgewicht
des Rennfahrzeuges) die Beschleunigung beeinflusst (Sie kennen das sicherlich
vom Fahrradfahren). Für ein Nutzfahrzeugmodell steht jedoch nicht geringes
Gewicht und maximale Antriebsleistung innerhalb kurzem Zeitraum, sondern
möglichst geringe Verluste und lange Fahrzeiten im Vordergrund. Das Gewicht
des Antriebsmotors ist als zweitrangig einzustufen.
Diese Aussagen haben für das sogenannte stationäre Verhalten des
Gleichstrommotors Gültigkeit, welches durch eine stationäre Kennlinie
dargestellt wird. Da unser Gleichstrommotor jedoch immer wieder in seiner
Drehzahl und Belastung verändert wird, ist das sog. dynamische Verhalten
für uns ebenfalls von grosser Wichtigkeit, da von praktischer Bedeutung.
Die für uns wichtigen Punkte sind die sog. Drehzahl-Drehmomenten-
Kennlinien (Drehzahl in Abhängigkeit des Drehmomentes) und die sog.
Ankerstrom-Drehmomenten-Kennlinien (Drehmoment in Abhängigkeit
von Ankerstrom). Wir wollen wissen, wie sich unser zukünftiger Gleichstrommotor
in unterschiedlichen Fahrsituationen verhält; sich also Drehmoment und
Stromverbrauch bei unterschiedlichen Belastungszuständen verhalten.
Im nachfolgenden Beispiel (Bild 7) ist ein dynamisches Verhalten grafisch
dargestellt.
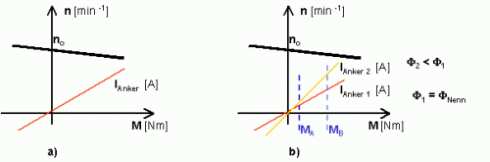
Bild 7 a) zeigt den Drehzahlverlauf in Abhängigkeit des angelegten Drehmomentes [M] sowie die Zunahme des aufgenommenen Ankerstromes [I_Anker]. Wir sehen in diesem Beispiel, dass auch bei steigender Belastung, der Drehzahlabfall relativ gering ist. Der Fachmann würde sagen, die Charakteristik eines solchen Motors ist "hart". Des weiteren ist auf Bild 7 a) die Stromaufnahme ersichtlich. Sie ist Null bei Drehmoment Null (dieser Punkt ist ausserhalb der Grafik in Bild 7) und steigt mit zunehmenden Drehmoment in unserem Beispiel relativ steil an.
Bild 7 b) zeigt dasselbe wie Bild 7 a), jedoch sind
zwei Stromverläufe gezeichnet: I_Anker_1
und I_Anker_2.
Der Einsatz eines (oft teuren) Gleichstromotors mit höherwertigem Magnetwerkstoff
ist demzufolge nicht notwendigerweise das Mass aller Dinge das
eine niedrige Stromaufnahme garantiert. Sorgt man dafür, dass das
angelegte Drehmoment möglichst klein ist, erreicht man unter Umständen
mehr; einen Betrieb mit "erträglichem" Stromverbrauch.
Genügt nämlich bereits ein niedriges Drehmoment (Bsp. M_A) um unser Modell
fortzubewegen (Bsp. unter Verwendung eines hochwertigen, sinnvoll abgestuften
Getriebe), so kann auch mit einem Gleichstrommotor "von der Stange" ein
akzeptabler Stromverbrauch erreicht werden, da wir uns beim Betrieb des
Modells nahe der Nenndrehzahl [no] bewegen. (Vergleichen Sie hierzu die
Schnittpunkte von I_Anker_1 und I_Anker_2
mit den beiden Momenten M_A und M_B: Sie stellen fest, dass bei M_A die
Differenz zwischen I_Anker_1 und
I_Anker_1 relativ gering ist. In
diesem Fall würde sich die Anschaffung eines teureren Elektromotors mit
höherwertigen Magnetwerkstoffen kaum lohnen.)
I_Anker_2 ist ein Beispiel für einen Gleichstrommotor mit geringerem magnetischen
Fluss. (Der magnetische Fluss ist vom verwendeten Magnetwerkstoff abhängig.)
Teure (= da selten oder komplex in der Herstellung) Magnetwerkstoffe haben
eine grosse Flussdichte und weisen in unserem Beispiel (I_Anker_1)
eine geringere Steigung des Stromverlaufes auf. Billige(re) Magnetwerksoffe hingegen
besitzen einen geringere Flussdichte auf und dadurch eine grosse Steigung
im Stromverlauf (I_Anker_2).
Was das in der Praxis bedeutet, sagt uns Bild 7b):
Liegt bei "Billigmotoren" ein grosses Drehmoment am Motor an, so nimmt die
Stromaufnahme stark zu, im Gegensatz zu Motoren mit hochwertigen Magnetwerkstoffen,
wo die Stromaufnahme weniger stark ansteigt. Ein Modell, welches also ständig
mit hohen Drehmomenten am Motorabtrieb (!) konfrontiert wird, nimmt in Abhängigkeit
des verwendeten Magnetwerkstoff unterschiedlich hohe Ströme auf. Wir können
also folgende Schlussfolgerungen daraus ziehen:
7. Die Drehzahlstellung ("Drehzahlsteuerung")
- Ankerspannung U_A (sog. Spannungssteuerung)
- Hauptfeldfluss '&eta' - sprich "Fih" (sog. Feldsteuerung) also quasi die "Stärke" des Magnetfeldes
- Ankerwiderstand R_Anker(sog. Widerstandssteuerung)
Spannungssteuerung
Feldsteuerung
Widerstandssteuerung